Method Overview
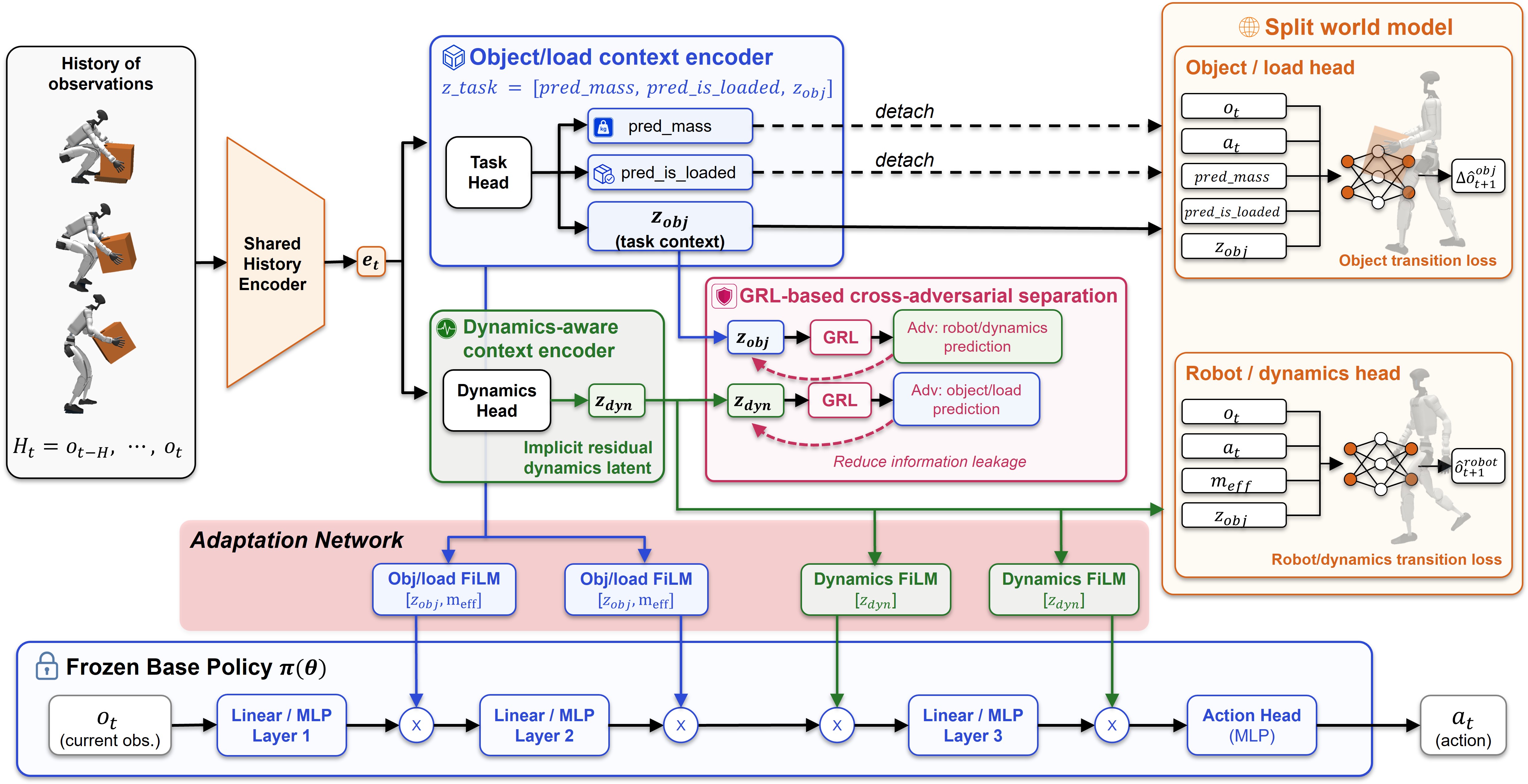
Humanoid loco-manipulation requires stable whole-body control under varying object masses and pickup/placement heights. This becomes particularly challenging in sim-to-real transfer, where object-induced load variation and robot-side dynamics mismatch interact during physical contact. Existing history-based adapters often compress these factors into a single latent representation, which can weaken robustness under heavy-load manipulation. We propose SplitAdapter: Load-Aware Humanoid Loco-Manipulation via Factorized Adaptation, which freezes a pretrained box manipulation policy and extends it with object/load and dynamics-aware context encoders trained with split world-model objectives, GRL-based cross-adversarial regularization, and hierarchical Feature-wise Linear Modulation (FiLM). In sim-to-sim experiments and real-world deployment, SplitAdapter improves Full-task success over the base policy and world-model FiLM baselines across object masses of 2, 4, and 6 kg and pickup/placement heights of 0, 30, and 60 cm, with the largest improvements under heavy-load conditions.
(SplitAdapter vs Base Policy)
(SplitAdapter)
@misc{kang2026splitadapterloadawarehumanoidlocomanipulation,
title={SplitAdapter: Load-Aware Humanoid Loco-Manipulation via Factorized Adaptation},
author={Jeonguk Kang and Hanbyel Cho and Sanghyun Kang and Donghan Koo},
year={2026},
eprint={2606.03297},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2606.03297},
}